
زنبور رباتیک ( RoboBee ) ، یک ربات دوزیست با مهارت های باورنکردنی!
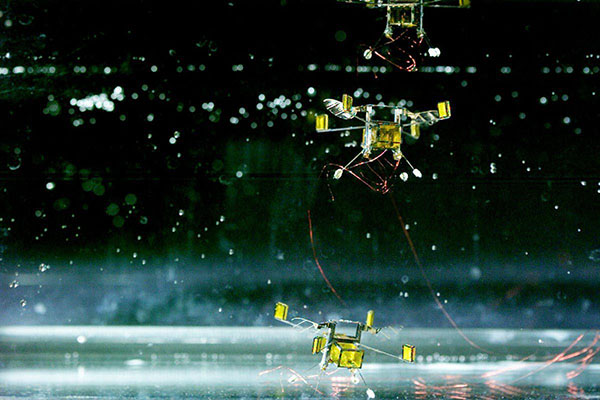
در گذشته شاهد نسل قدیمی زنبور رباتیک دانشگاه هاروارد ( RoboBee ) بودیم، که می توانست پرواز کند، به دیوار کاملا عمودی بچسبد و به عمق آب برود و در عمق آب کاوش کند. امروزه، محققان دانشگاه هاروارد نسل جدید ربات حشره مانند هیبریدی را طراحی کرده اند. این ربات، می تواند پرواز کند، در آب شیرجه بزند، با مهارت خیره کننده در آب شنا کند و از روی سطح آب پرواز کند و به راحتی در زمین راه برود. می توان گفت این ربات، یک ربات دوزیست است.
توضیح طراحان ربات دوزیست در مورد این پروژه و کاربردهایش
این ربات دوزیست از نسل میکرو ربات های چند منظوره می باشد. دستگاه های شناور جدید این ربات را قادر می سازند که روی سطح آب شناور بماند. این ربات دوزیست برای پرواز مستقیم از روی سطح آب به هوا ، از یک سیستم احتراق داخلی استفاده می کند.
نسل جدید زنبور رباتیک ( RoboBee ) دانشگاه هاروارد، هزار برابر سبکتر از ربات قبلی دانشگاه هاروارد است. این ربات می تواند برای هدف ها و برنامه های متنوعی استفاده شود.کاربردهایی مانند: علمیات جستجو و نجات، حفظ محیط زیست و مطالعات بیولوژیکی.
نتیجه این تحقیق در مجله علم روباتیک دانشگاه هاروارد به طور کامل شرح داده شده است. یک تیم از محققان دانشکده فنی و علوم کاربردی دانشگاه هاروارد با نام جان ا. پل (SEAS) و موسسه مهندسی زیست شناسی در دانشگاه هاروارد ( Wyss )، هدایت این پروژه را بر عهده داشتند.
یوفنگ چن، دانشجوی کارشناسی ارشد آزمایشگاه Microrobotics موسسه ( SEAS ) توضیح می دهد: این اولین میکرو رباتی است که می تواند بارها و بارها در محیط های پیچیده حرکت کند. محیط هایی مانند هوا، زمین و آب. مکانیزم های جدیدی که ما طراحی کرده ایم، به این ربات اجازه می دهد از روی سطح آب مستقیم به هوا پرواز کند. نتیجه ای که در نهایت می بینید، چیزی فراتر از دنیای واقعی حشرات است.
بیتشتر بدانیم: ربات جراح دانشگاه هاروارد؛ آندوسکوپی نرم و سریع >>
چالش های ساخت ربات دوزیست و روش های غلبه بر این چالش ها
طراحی یک ربات میلیمتری که در داخل و خارج از آب حرکت می کند چالش های زیادی دارد.
اولین چالش اینکه: مولکول های آب، ۱۰۰۰ برابر فشرده تر از مولکول های هوا است. پس سرعت چرخش بالها باید بین دو محیط متفاوت باشد. اگر فرکانس چرخش بالها بسیار پایین باشد، زنبور رباتیک قادر به پرواز نیست. اگر فرکانس چرخش بالها بسیار بالا باشد، بال در آب در اثر ضربه های ناگهانی آسیب جدی می بیند.
با ترکیب مدل سازی نظری و داده های تجربی حاصل از آزمایش های متعدد، محققان به ترکیب جدیدی برای ساختار بال این ربات دست یافتند. آنها متوجه شدند ساختار بال این ربات باید مانند زنبور عسل ، مشبک و پوسته پوسته مانند باشد تا بتواند به طور مدام در هوا و آب حرکت کند. با این روش سرعت مناسب برای چرخش بالها در هوا، ۲۲۰ تا ۳۰۰ هرتز برآورد شد. سرعت مناسب برای حرکت بالها در آب نیز ۹ تا ۱۳ هرتز پیش بینی شد.
چالش مهم بعدی؛ غلبه بر تنش های محیطی برای ورود و خروج از آب بود. در مقایس میلی متری، سطح آب نیز می تواند همانند یک دیوار آجری باشد. تنش های محیطی وارد شده بر “زنبور رباتیک”(RoboBee) چیزی حدود ده برابر وزن و سه برابر طولش است. این ربات وزنی حدود ۸۰ میلی گرم دارد. طول این ربات نیز ۲ سانتی متر می باشد.
تحقیقات قبلی نشان داد که چگونه لبه های تیز ساختار بال ربات می تواند بر تنش های سطحی غلبه کند. با این روش ، سطح آب را برای ورود ربات دوزیست به آب شکافته می شود. اما این سوال پا برجا می ماند که ، چگونه می توان بارها و بارها از آب خارج شد و به آن بازگشت؟
به منظور حل این مشکل، طراحان اقدام به نصب ۴ ناوبر شناور بر روی این زنبور رباتیک کردند. یک فضا را هم برای جمع آوری گاز مرکزی در نظر گرفتند. جای این محفظه شناور در زیر ربات در نظر گرفته شده است. وقتی که زنبور رباتیک برای شنا وارد آب می شود، یک صفحه الکتریکی در محفظه ذکر شده، آب را به اُکسید هیدروژن تبدیل می کند. اُکسید هیدروژن، یک سوخت قابل احتراق است. یک جرقه کوچک، اُکسید هیدروژن قابل احتراق را فعال می کند و آن را به سوخت تبدیل میکند تا انرژی لازم برای بلند شدن از سطح آب را برای ربات فراهم کند.
آینده ربات دوزیست
زنبور رباتیک ظرفیت محدودی برای حمل بار دارد. بنابراین قادر نیست سوخت مورد نیازش را با خود حمل کند. پس نیاز به یک راه حل خلاقانه بود. نگاه ما به تنش های جوی، نگاه محدود کننده و مشکل ساز نبود. بلکه ما از این تنش ها استفاده کردیم و سوخت مورد نیاز ربات را تامین کردیم.
به دلیل کمبود سنسورهای جانبی و محدودیت در سیستم ردیابی، زنبوررباتیک هنوز قادر نیست بلافاصله بعد از شنا در آب، از روی سطح آب پرواز کند. اما محققان دانشگاه هاروارد ابراز امیدواری کرده اند که در آینده نه چندان دور این نقص برطرف خواهد شد.
نیروهای تنش سطحی، همانند یک دیوار غیر قابل نفوذ هستند. این ربات های کوچک به ما فرصت کشف این نیروهای غیر قابل دیدن را می دهند. در حقیقت آینده پیش رو این امکان را می دهد محدودیت ها را به فرصت تبدیل کنیم.
پروانه ثبت اختراع این ربات در اختیار دانشگاه هارواد است. دانشگاه هاروارد به دنیال فرصت برای تجاری ساختن این ایده می باشد.
برگرفته از سایت: Harvard




ثبت ديدگاه