آندوسکوپی با ربات جراح دانشگاه هاروارد
ربات جراح دانشگاه هاروارد تحول تازه ای را در علم پزشکی ایجاد کرده است. در حال حاضر برای اندوسکوپی ابزار تصویربرداری و جراحی به وسیله لوله بلندی وارد بدن بیمار می شود. سپس جراح با کمک آنها، جراحی لازم را در بدن بیمار انجام می دهد. این روش قدیمی برای بیماران دردناک است. به علاوه با دستگاه های کنونی مهارت ها و سرعت جراحان در عمل جراحی و آندوسکوپی کاهش یافته است.
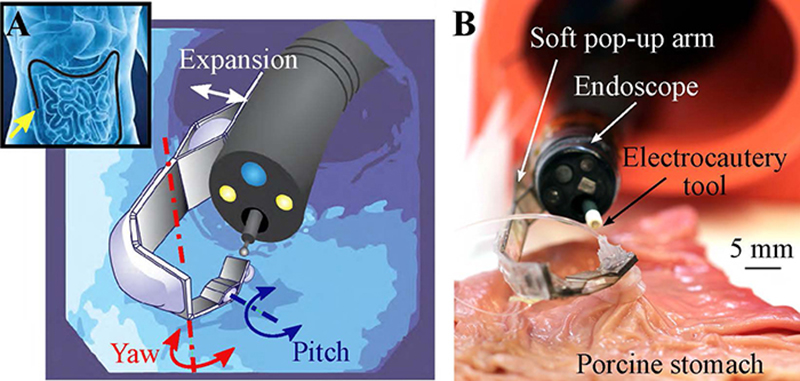
پژوهشگران دانشکده مهندسی و علوم کاربردی دانشگاه هاروارد، جان. ا. پالسون و موسسه Wyss ( این موسسه در زمینه مهندسی الهام گرفته از بیولوژی فعال است.) ربات جراح (بازوی رباتیکی) متفاوتی را طراحی کرده اند. این ربات بر خلاف ابزارهای موجود اندوسکوپی، انعطاف پذیر است. در هنگام عبور آندوسکوپ از مجراهای باریک، به طور کامل جمع می شود و به بدنه لوله می چسبد. همچنین این بازوی رباتیک از در چندین جهت می چرخد و حرکت آزادنه ای دارد.
بیشتر بدانیم : ربات طراح اکسی دراو : ربات دستنویس امضای شما را با مهارت تقلید می کند. >>
بیشتر بدانیم : ربات با احساس کازمو : احساسات انسانی در کوچکترین ربات دنیا >>
ساختار ربات جراح دانشگاه هاروارد
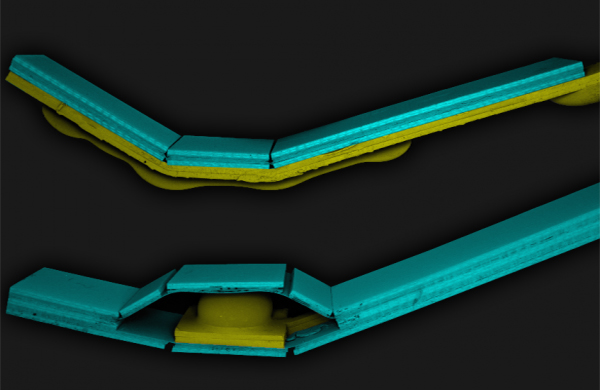
این ربات از لحاظ ساختار و اسکلت بندی به صورت ترکیبی طراحی شده است. ساختار این ربات شامل یک اسکلت سخت است که توسط مواد انعطاف پذیر و نرم ( یک لیتوگرافی نرم) احاطه شده. علاوه بر این، ربات جراح هاروارد به سنسورهایی مجهز شده که مکان، نوع حرکت و اندام مورد لمس را به پزشک اطلاع می دهند. این ربات می تواند با شرایط بافت های بدن ساختار خود را هماهنگ کند. این ربات توانایی تشخیص بافت نرم و سخت را دارد. به این معنی که تصادفا بافت های بدن و پانسمان را پاره نخواهد کرد.
ساختار ترکیبی این ربات به این صورت است: قسمت های سخت و نرم با پیوند شیمیایی غیر قابل برگشت به یکدیگر متصل شده اند. در این اتصال ها هیچ گونه چسبی استفاده نشده است. این ساختار باعث شده این ربات نسبت به نمونه های موجود به طرز قابل توجهی انعطاف پذیرتر باشد. ربات مورد بحث برای گرفتن و نگهداشتن بافت ها به جای ابزارهای سخت و فلزی، از یک مکنده استفاده می کند. در نتیجه آسیب کمتری به اندام های درونی و بافت های نرم وارد خواهد کرد.
ربات جراح دانشگاه هاروارد- بازوی رباتیک انعطاف پذیر- robotic arm- endoscopy
نظر یکی از پژوهشگران ربات جراح در مورد این ربات
توماس رانزنی یکی از اعضای ارشد موسسه Wyss توضیح می دهد:در مقیاس میلی متری این ربات، یک نرم افزار بسیار نرم می شود که نمی تواند به بافت های نرم بدن صدمه بزند. و همچنین ساختارش به گونه ای نیست که بافت های نرم بدن را به طور قابل توجه و معنی دار ( که باعث اختلال در کارکرد بافت شود یا جا به جایی بافت به چشم بیاید ) جا به جا کند.
همچنین ربات مورد بحث برای حرکت و انجام فعالیت های مورد نظر، از یک عملگر مکانیکی-آبی استفاده می کند که با کنترل جریان و فشار آب، عملکردهای مختلفی مانند جمع و باز شدن ساختار این ربات امکان پذیر است. به طور کلی ساختار این ربات و محرک نرم افزاری اش بر مبنای آب است.
پیش بینی آینده ربات جراح
تحقیقات محققان ثابت کرده است که این ربات قابلیت این را دارد که تا ابعاد یک میلی متری کوچک شود و کارایی اش را حفظ کند. بر اساس اظهارات مسئولین پروژه، فرآیند ساخت ربات جدید برای تولید انبوه ساده است. پس این قابلیت را دارد که به تولید انبوه برسد. نکته جالب این است که می توان آن را در ابعاد میلیمتری، و برای عبور از مجاری بسیار نازک در ریه و مغز طراحی و تولید نمود.
گفتنی است تیم پروژه در حال حاضر این ربات را در بیرون بدن موجود زنده و بر روی بافت معده خوک آزمایش کرده اند. نتیجه این آزمایش با موفقیت همراه بوده است. در گام بعدی قصد دارند این ربات انعطاف پذیر را، برای انجام عمل جراحی درون بدن یک حیوان زنده آزمایش کنند.
پروانه ثبت اختراع این ربات در اختیار دفتر توسعه فناوری دانشگاه هاروارد می باشد.
برگرفته از سایت: seas harvard




ثبت ديدگاه